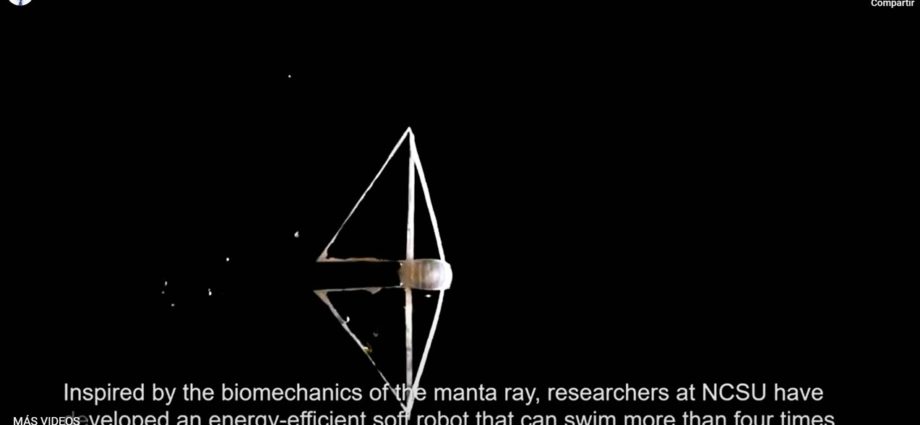
Está inspirado en la biomecánica de la mantarraya y sus alas en las horquillas del pelo tipo clip. Nada cuatro veces más rápido que anteriores robots.
Mar Aguilar
Un equipo de investigadores de la Universidad Estatal de Carolina del Norte ha desarrollado un robot blando capaz de nadar cuatro veces más rápido que anteriores robots blandos de natación.
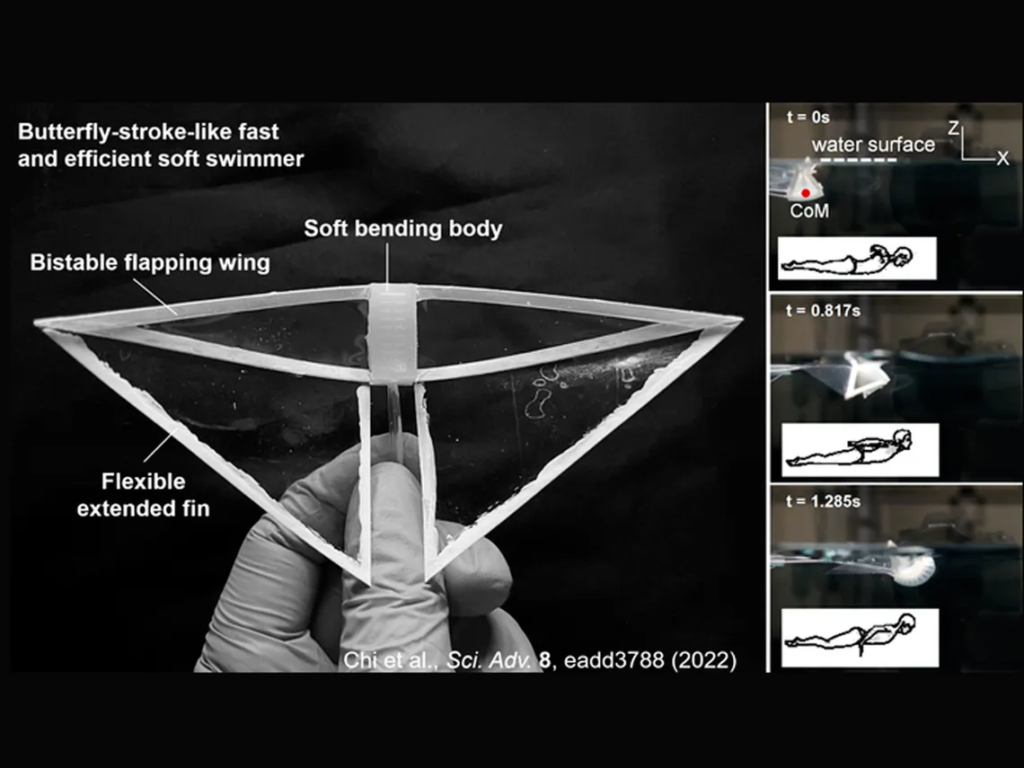
El robot, al que se denomina “robot mariposa” porque su movimiento es parecido al de los brazos de una persona al nadar a mariposa está inspirado en la biomecánica de la mantarraya y es de bajo consumo.

iStock
«Hasta la fecha, los robots blandos nadadores no han sido capaces de nadar más rápido que una longitud corporal por segundo, pero los animales marinos (como las mantas) son capaces de nadar mucho más rápido, y de forma mucho más eficiente», dice Jie Yin, uno de los autores del estudio que se ha publicado en Science Advances. «Queríamos aprovechar la biomecánica de estos animales para ver si podíamos desarrollar robots blandos más rápidos y con mayor eficiencia energética. Los prototipos que hemos desarrollado funcionan excepcionalmente bien».
En el estudio se han desarrollado dos tipos de robots mariposa. Uno pensado para ser veloz, y que fue capaz de alcanzar velocidades medias de 3,74 longitudes de cuerpo por segundo. Y otro ideado para ser muy maniobrable, capaz de realizar giros bruscos a derecha y a izquierda. Este tipo de robot alcanzó velocidades de 1,7 cuerpos por segundo.
«Los investigadores que estudian la aerodinámica y la biomecánica utilizan algo llamado número de Strouhal para evaluar la eficiencia energética de los animales que vuelan y nadan», dice Yinding Chi, otro autor. «La máxima eficiencia de propulsión se produce cuando un animal nada o vuela con un número Strouhal de entre 0,2 y 0,4. Nuestros dos robots mariposa tenían números Strouhal en este rango».
Los robots mariposa obtienen su potencia de natación de sus alas, que son «biestables». Esto significa que tienen dos estados estables. El ala es similar a una horquilla del pelo tipo clip (en la que se inspira), que es estable hasta que se le aplica una determinada cantidad de energía (doblándola). Cuando la cantidad de energía alcanza el punto crítico, la horquilla adopta una forma diferente, que también es estable.
Las alas de estos robots están unidas a un cuerpo blando hecho de silicona. Para que las alas cambien de un estado estable a otro, se bombea aire en las cámaras del cuerpo. Cuando esas cámaras se inflan y desinflan, el cuerpo se dobla hacia arriba y hacia abajo, obligando a las alas a moverse hacia adelante y hacia atrás.
Robot mariposa
«La mayoría de los intentos anteriores de desarrollar robots con aleteo se han centrado en utilizar motores para proporcionar energía directamente a las alas», afirma Yin. «Nuestro enfoque utiliza alas biestables que se accionan pasivamente moviendo el cuerpo central. Se trata de una distinción importante, porque permite un diseño simplificado, que reduce el peso».
El robot mariposa más rápido cuenta con una «unidad motriz» (el cuerpo blando), que controla las alas. Esta característica lo hace muy rápido, pero difícil de girar a la izquierda o a la derecha. El que es más maniobrable tiene, por el contrario, dos unidades motrices, que están conectadas una al lado de la otra. Este diseño permite manipular las alas por ambos lados, o «batir» solo una, que es lo que le permite hacer giros bruscos.
«Este trabajo es una emocionante prueba de concepto, pero tiene limitaciones», dice Yin. «La más evidente es que los prototipos actuales están sujetos por tubos delgados, que es lo que utilizamos para bombear aire a los cuerpos centrales. Actualmente estamos trabajando para desarrollar una versión autónoma y sin ataduras».
Referencia: Hong, Y., Zhao, Y., Li, Y. Snapping for high-speed and high-efficient, butterfly stroke-like soft swimmer. 2022. Science Advances. DOI: https://doi.org/10.1126/sciadv.add3788